Robotik
Ultrasound Muscles: The Future of Soft Robotics

Building Sound-Controlled Muscles
For most of history, mechanical energy was provided by muscles, whether human or animal. It is only with the onset of the Industrial Revolution that energy from wind (windmills), water (watermills and dams), and combustion (steam engines, combustion engines) could be harvested.
But these mechanical systems were always somewhat inferior to natural movement, requiring complex systems and maintenance to achieve a relatively poor freedom of movement in comparison.
This is still an issue for robots, which tend to require very complex arrays of electrical motors and advanced software to manage to stay upright. The issue is generally to create a fully controllable and flexible enough movement.
So, as the muscle is such a superior way of generating movement, scientists have been looking at creating an artificial variant of it, which could be powered by electricity. Until now, proposed materials have always fallen short in performance, costs, or method of fabrication.
This might change, thanks to a new design of artificial muscle proposed by researchers at the ETH Zürich (Switzerland), University of Münster (Germany), and University of Nebraska-Lincoln (USA).
They published in the prestigious scientific journal Nature1, under the title “Ultrasound-driven programmable artificial muscles”
How Ultrasound-Driven Muscles Work
Muscles work by increasing or decreasing the length of the muscle, pulling on the bone to which it is attached.

Artificial muscles so far have tried to replicate this idea with multiple types of materials:
- Carbon nanotubes
- Shape-memory alloys
- Pneumatics (air) or hydraulic systems
These systems all suffered from either a lack of reliability, fine-tuned control, energy consumption, or too high costs.
“Chemical methods often require fuels that could be toxic, light-based systems suffer from limited tissue penetration and potential thermal damage, and magnetic systems necessitate bulky hardware while risking Joule heating.”
The researchers in this study went in a new and different direction to control the artificial muscle: sounds.
The Advantages of Ultrasound
Whether for applications in robotics or biomedical implants, ultrasounds have the advantage of being an easy-to-create control method that is entirely non-destructive.
Ultrasounds are also wireless, remote, go harmlessly through external layers (including organic tissues), and have high spatial selectivity (aiming).
It is also a technology commonly used at low costs, including in a clinical setting.
So overall, ultrasounds are perfect for biomedical and in vivo applications, but could also be used for other fields like robotics, especially so-called soft robotics.
Ultrasounds are increasingly popular with researchers, who are using them to power medical implants wirelessly, to bioprint living tissues, and for biomonitoring.
Microbubble Materials in Artificial Muscles
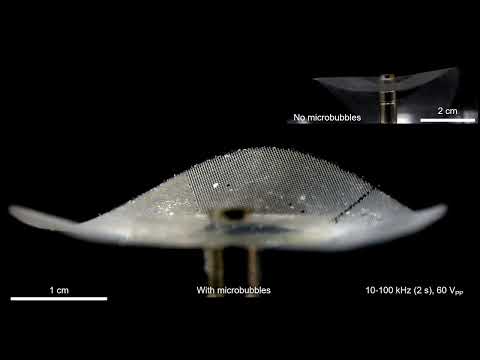
In this study, the researchers created a material containing a precisely manufactured array of microbubbles, which, when exposed to the right resonance of ultrasound, cause the material to bend.

Source: Nature
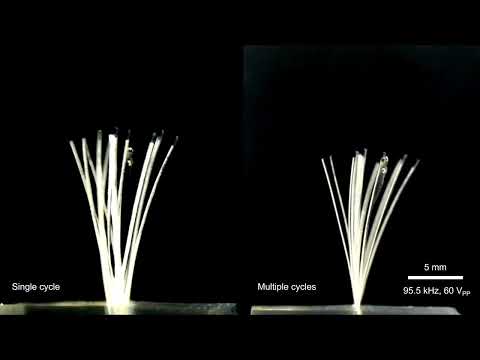
When varying the size of the microbubbles array, it can change which ultrasound frequency a given section of the material reacts to.

Source: Nature
So far, the force generated by ultrasound in artificial muscle has been too weak to have practical applications. But this new design is a lot stronger (7.6 μN/mm2), bringing such a concept to the forefront of potential artificial muscle material.
A high-resolution mould was created with micropillar arrays, patterned on a silicon wafer using soft lithography, to serve as negative moulds for cylindrical microcavities.
A thin layer of polydimethylsiloxane (PDMS) was then spin-coated onto the wafer, creating the desired microbubble material.
The final material formed an artificial muscle (3 cm × 0.5 cm × 80 μm), which contains over 10,000 uniform microbubbles within cavities (40 μm diameter, 50 μm depth).
Creating Controlled Motion With Ultrasound
Because different parts of the material react to different frequencies, modulating the ultrasound can be used to create a precisely controlled undulation movement, for example. The researchers also tested interactions of the material with the real world, using it to trap a fish larva, rotate an almond, or move a blade of grass. It also demonstrated that the method was harmless for living organisms, with no heating or negative effects from the ultrasounds.
The researchers then tested whether the material could be used to attach and move organic tissues. To do so, they tested it with a pig heart. The ultrasound-controlled actuators stayed attached and kept moving, transferring force to the tissue.

Source: Nature
They also tested the material’s potential for drug delivery, with ultrasound used as the trigger for the release of the material from the microbubble patch.
Moving In-Vivo Robots
Lastly, the research created a “mini-stingray bot” whose undulations can control the movement in a liquid environment.

Source: Nature
They then successfully tested the movement of the stingray bot into a pig’s stomach and intestine.
Upon release, the stingray bot propels forward at an initial speed of about 0.8 body lengths per second, demonstrating the ability of the system to move inside an animal’s internal organs.

Source: Nature
Altogether, these experiments confirmed the material’s potential for in vivo use of wireless and wearable devices.
Applications
The study focused on potential biomedical applications, as this could be the most straightforward application of this technology. Soft robotics is increasingly used to integrate materials used in medicine, for example, delivering to the right organ anti-cancer drugs or other treatments.
This method can also be expanded to larger pieces, up to the centimeter scale at least, and with many degrees of freedom of movement.
So later on, such artificial muscles could be used for robotics, flexible electronics, wearable technologies, prosthetics, biomedical instrumentation, etc.
Further improvement could also make this concept even more powerful and useful:
- It seems that converging trapezoidal cavities could generate roughly 3x stronger streaming velocities than diverging shapes. So geometric and density optimization could create actuators with tailored deformation profiles.
- A confocal sound source could achieve stronger deformation and more precise targeting of a specific part of the artificial muscle.
- Hydrogels and biodegradable polymers could also be used for more biomedical applications.
Swipe to scroll →
| Application Sector | Use Case Example | Adoption Potential |
|---|---|---|
| Soft Robotics | Flexible grippers and walking robots | High |
| Biomedical Implants | Wireless actuation for internal tissues | Very High |
| Drug Delivery | Ultrasound-triggered release mechanisms | High |
| Wearable Devices | Smart patches and haptic feedback systems | Medium |
| Prosthetics | Artificial muscle integration for lifelike movement | High |
Investing in HealthTech
Koninklijke Philips N.V.
(PHG )
Study Referenced
1. Shi, Z., Zhang, Z., Schnermann, J. et al. Ultrasound-driven programmable artificial muscles. Nature 646, 1096–1104 (2025). https://doi.org/10.1038/s41586-025-09650-3
Latest Koninklijke Philips N.V.( PHG) Stock News and Developments












